
दृश्य:0 लेखक:साइट संपादक समय प्रकाशित करें: २०२०-०९-२८ मूल:साइट








एक वृद्धिशील एनकोडर क्या है
एक वृद्धिशील रोटरी एनकोडर चक्रीय आउटपुट (केवल) प्रदान करता है जब एनकोडर घुमाया जाता है।वे या तो यांत्रिक, ऑप्टिकल या चुंबकीय हो सकते हैं।यांत्रिक प्रकार को डिबाउंसिंग की आवश्यकता होती है और आमतौर पर उपभोक्ता उपकरणों सहित उपकरणों पर डिजिटल पोटेंशियोमीटर के रूप में उपयोग किया जाता है।अधिकांश आधुनिक घर और कार स्टीरियो वॉल्यूम नियंत्रण के लिए यांत्रिक रोटरी एनकोडर का उपयोग करते हैं।इस तथ्य के कारण कि यांत्रिक स्विचों को डिबाउंसिंग की आवश्यकता होती है, यांत्रिक प्रकार की घूर्णी गति सीमित होती है जिसे वे संभाल सकते हैं।वृद्धिशील रोटरी एनकोडर अपनी कम लागत और सिग्नल प्रदान करने की क्षमता के कारण सभी रोटरी एनकोडर में सबसे व्यापक रूप से उपयोग किया जाता है, जिसे वेग जैसी गति संबंधी जानकारी प्रदान करने के लिए आसानी से व्याख्या किया जा सकता है।
तथ्य यह है कि वृद्धिशील एनकोडर केवल दो सेंसर का उपयोग करते हैं, इससे उनके रिज़ॉल्यूशन से समझौता नहीं होता है।बाज़ार में प्रति क्रांति 10,000 तक या उससे अधिक गिनती वाले वृद्धिशील एनकोडर मिल सकते हैं।
एक वैकल्पिक तीसरा आउटपुट हो सकता है: संदर्भ या 'इंडेक्स', जो हर मोड़ पर एक बार होता है।इसका उपयोग तब किया जाता है जब पोजिशनिंग सिस्टम जैसे पूर्ण संदर्भ की आवश्यकता होती है।इंडेक्स आउटपुट को आमतौर पर Z लेबल किया जाता है।
ऑप्टिकल प्रकार का उपयोग तब किया जाता है जब उच्च गति का सामना करना पड़ता है या उच्च स्तर की सटीकता की आवश्यकता होती है।
वृद्धिशील एनकोडर का उपयोग गति को ट्रैक करने के लिए किया जाता है और इसका उपयोग स्थिति और वेग निर्धारित करने के लिए किया जा सकता है।यह या तो रैखिक या रोटरी गति हो सकती है।क्योंकि दिशा निर्धारित की जा सकती है, बहुत सटीक माप किया जा सकता है।
वे ए और बी नामक दो आउटपुट नियोजित करते हैं, जिन्हें चतुर्भुज आउटपुट कहा जाता है, क्योंकि वे चरण से 90 डिग्री बाहर हैं।
राज्य आरेख:
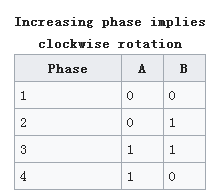
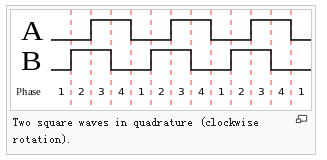
दो आउटपुट तरंग रूप चरण से 90 डिग्री बाहर हैं, जो कि चतुर्भुज का अर्थ है।इन संकेतों को काउंट अप पल्स या काउंट डाउन पल्स उत्पन्न करने के लिए डिकोड किया जाता है।सॉफ्टवेयर में डिकोडिंग के लिए, ए और बी आउटपुट को सॉफ्टवेयर द्वारा पढ़ा जाता है, या तो किसी किनारे पर रुकावट या पोलिंग के माध्यम से, और दिशा को डिकोड करने के लिए उपरोक्त तालिका का उपयोग किया जाता है।उदाहरण के लिए, यदि अंतिम मान 00 था और वर्तमान मान 01 है, तो डिवाइस दक्षिणावर्त दिशा में एक आधा कदम आगे बढ़ गया है।राज्य परिवर्तन को पहचानने से पहले समान (वैध) मान को एक निश्चित संख्या में पढ़ने की आवश्यकता के द्वारा पहले यांत्रिक प्रकारों पर बहस की जाएगी।
डिटेन्ट वाले एनकोडर पर राज्यों को स्विच करने के विभिन्न तरीके हैं।कुछ में, ए और बी दोनों हमेशा डिटेंट पर खुले सर्किट होते हैं, और एक डिटेंट से दूसरे में संक्रमण के दौरान एक संपूर्ण 00 → 00 स्विचिंग चक्र होता है।दूसरों के पास वैकल्पिक 00 और 11 मान के डिटेंट होते हैं, डिटेंट के बीच संक्रमण के दौरान कंपित स्विचिंग समय के साथ।
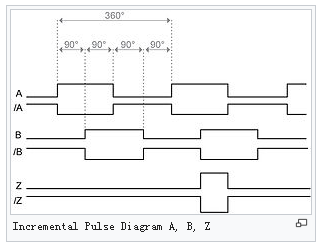
इसके अतिरिक्त कुछ वृद्धिशील एनकोडर 'Z' सिग्नल आउटपुट करते हैं।प्रत्येक घूर्णन के बाद, यह Z सिग्नल बिल्कुल उसी स्थिति पर, सामान्यतः 90 (इलेक्ट्रिकल) डिग्री तक बढ़ रहा है।इसका उपयोग सटीक संदर्भ बिंदु के रूप में किया जा सकता है।कुछ वृद्धिशील एनकोडर में अतिरिक्त अंतर संकेत भी होते हैं, जिन्हें '/A', '/B' और '/Z' कहा जाता है।ये सिग्नल उल्टे 'A', 'B' और 'Z' सिग्नल हैं।यह सुनिश्चित करने के लिए कि ट्रांसमिशन के दौरान कोई त्रुटि न हो, नियंत्रक प्रत्येक जोड़ी की तुलना कर सकते हैं ('A' उल्टे '/A' के बराबर होना चाहिए)।
एक पर्यवेक्षक, जैसे कि माइक्रोप्रोसेसर, एनकोडर के आउटपुट को पढ़ेगा (नमूना)।पर्यवेक्षक को एनकोडर आउटपुट का बार-बार नमूना लेने की आवश्यकता होती है ताकि वह किसी भी कोड परिवर्तन से न चूके।यदि एनकोडर बहुत तेजी से घूमता है, तो पर्यवेक्षक एनकोडर आउटपुट परिवर्तन को मिस कर सकता है, इसलिए पर्यवेक्षक को एक अमान्य संक्रमण दिखाई देगा, जैसे कि 00 → 11, और भ्रमित हो जाएगा।उस संक्रमण के लिए, पर्यवेक्षक को यह नहीं पता होता है कि एनकोडर किस दिशा में मुड़ा है: यह आगे (00 → 01 → 11) या पीछे (00 → 10 → 11) जा सकता है।यदि एनकोडर और भी तेजी से घूम रहा है, तो कई आउटपुट परिवर्तन छूट सकते हैं, और पर्यवेक्षक को दिशा गलत हो सकती है।आगे बढ़ने के क्रम 00 → 01 → 11 → 10 (3 कदम आगे) पर विचार करें।यदि एनकोडर बहुत तेजी से घूम रहा है, तो पर्यवेक्षक केवल पहला (00) और चौथा (10) आउटपुट देख सकता है और निष्कर्ष निकाल सकता है कि एनकोड ने कानूनी 00 → 10 संक्रमण (1 कदम पीछे) किया है।
इसी सिद्धांत का उपयोग बॉल चूहों में यह ट्रैक करने के लिए किया जाता है कि माउस दाएं/बाएं या आगे/पीछे जा रहा है या नहीं।
एकल आउटपुट (यानी पल्सर) वाले रोटरी एनकोडर का उपयोग गति की दिशा को समझने के लिए नहीं किया जा सकता है।वे उन प्रणालियों के लिए उपयुक्त हैं जो गति-गति चर को मापते हैं।कुछ अनुप्रयोगों में इनका उपयोग गति की दूरी मापने के लिए किया जा सकता है।
